Настройка Allen-Bradley ControlLogix Modbus TCP: Руководство по конфигурации RSLogix 5000
В: Почему мне нужен Modbus TCP в системе Allen-Bradley ControlLogix?
ПЛК Allen-Bradley ControlLogix изначально поддерживают EtherNet/IP. Однако многие полевые устройства — особенно частотные преобразователи Schneider Electric Altivar (ATV), реле защиты Sepam и счетчики электроэнергии PowerLogic — поддерживают только Modbus TCP. Это несоответствие требует использования шлюза протоколов или встроенного клиента Modbus TCP в платформе ControlLogix.
Рекомендуемый подход — использование модуля связи Allen-Bradley 1756-EN2T EtherNet/IP Communication Bridge Module с работающим клиентским уровнем Modbus TCP. Для резервированных сетевых приложений модуль Rockwell 1756-EN2TR Dual EtherNet/IP обеспечивает поддержку Device Level Ring (DLR) вместе с возможностями клиента Modbus TCP. Альтернативно, модуль Allen-Bradley 1756-EN3TR ControlLogix Ethernet/IP поддерживает расширенные функции безопасности для развертывания Modbus TCP в сегментированных OT-сетях.
В: Какое оборудование и сетевые настройки нужны перед началом?
- Модуль EtherNet/IP 1756-EN2T или 1756-EN3TR в слоте 1 шасси ControlLogix.
- Частотный преобразователь Schneider ATV630, подключенный к той же заводской Ethernet-сети с IP-адресом 192.168.1.20.
- Экранированный кабель CAT6 от порта EN2T до управляемого коммутатора. Избегайте последовательного подключения частотных преобразователей напрямую к модулю контроллера.
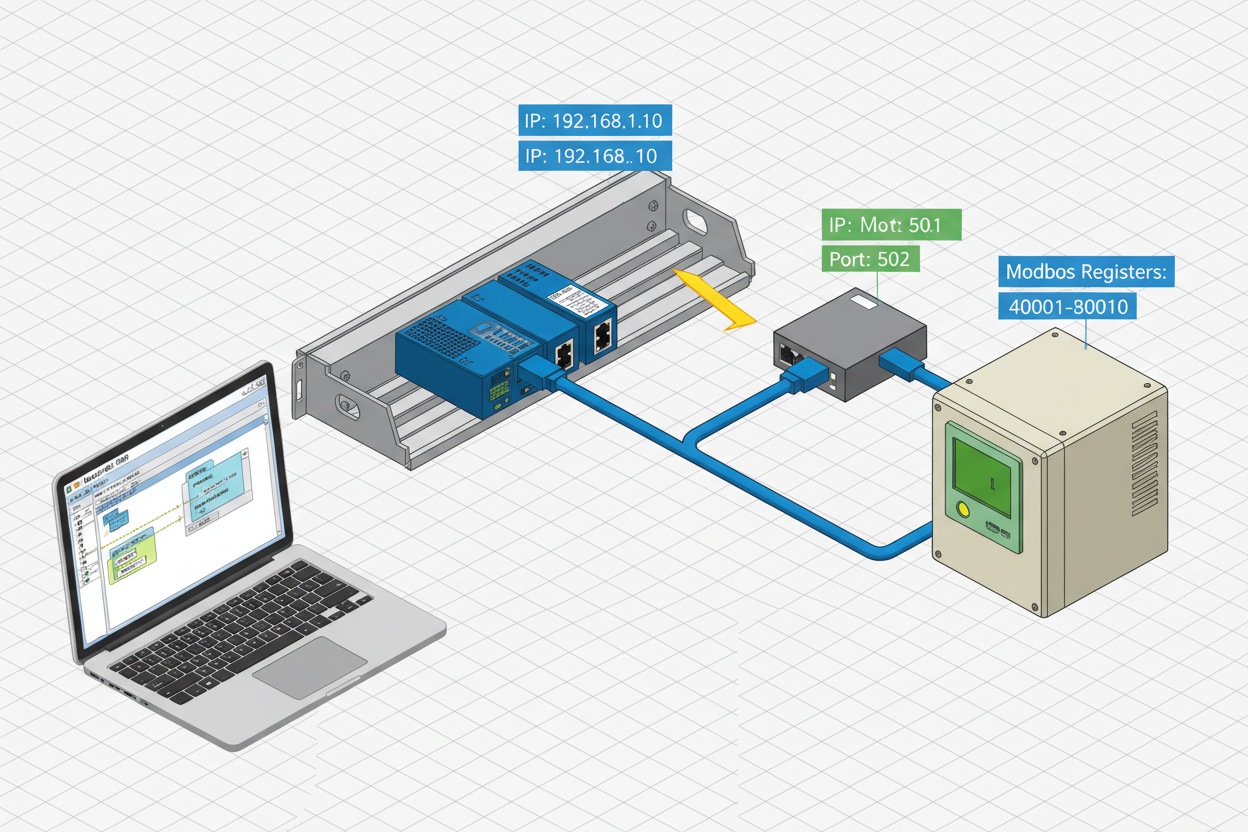
- Подсеть сети должна быть согласованной: ПЛК с адресом 192.168.1.10, частотник 192.168.1.20, шлюз 192.168.1.30.
- Modbus TCP использует порт 502. Убедитесь, что порт 502 открыт на заводском файрволе для соответствующего VLAN.
В: Как настроить модуль 1756-EN2T в RSLogix 5000?
- В дереве проекта щелкните правой кнопкой мыши I/O Configuration → 1756-Backplane → 1756-L85E. Выберите New Module. Найдите «1756-EN2T».
- Установите IP-адрес модуля на 192.168.1.10. Настройте номер слота (обычно слот 1) и размер шасси.
- В свойствах модуля включите Use Unicast Connection для целей Modbus TCP. Это уменьшит сетевой широковещательный трафик на больших подсетях Modbus.
- Установите Requested Packet Interval (RPI) на 100 мс для критичных регистров процесса. Для некритичного мониторинга допустимо 500 мс.
В: Как сопоставить регистры Modbus ATV630 с тегами ControlLogix?
Добавьте новое устройство Modbus TCP Master (Client) из Add-on Profile (AOP) для модуля EN2T. Настройте целевое устройство: IP-адрес 192.168.1.20, порт 502, Unit ID 255 (стандарт для Modbus TCP). ATV630 использует следующие ключевые диапазоны регистров:
- Регистр 32001 (CMd): Команда запуска/остановки — запись 1 = Вперед, 6 = Стоп.
- Регистр 32002 (FrS): Ссылка частоты — запись значения от 0 до 1000, соответствующего 0–100% максимальной частоты.
- Регистр 32101 (nSt): Статус преобразователя — чтение для подтверждения состояния Запуск/Стоп/Авария.
- Регистр 32102 (rFr): Обратная связь по выходной частоте — чтение в Гц.
Сопоставьте регистры Modbus с тегами ControlLogix: ATV630_CMD_WORD (INT), ATV630_FREQ_REF (INT), ATV630_STATUS (INT), ATV630_FREQ_FB (REAL).
В: Как написать логику чтения/записи Modbus TCP в RSLogix 5000?
- Создайте периодическую задачу (100 мс) для запуска запроса Modbus. Используйте инструкцию MSG, настроенную как Modbus Read.
- Чтение сообщения: Сервис = Read Holding Registers (Функция 03), Исходный элемент = ATV630_FREQ_FB, Количество элементов = 1, Адрес устройства = 192.168.1.20, Смещение Modbus = 32101 (вычесть 1 из номера регистра — Modbus использует адресацию с 1).
- Запись сообщения: Сервис = Write Multiple Registers (Функция 16), Исходный элемент = ATV630_FREQ_REF, Количество регистров = 1, Смещение Modbus = 32001.
- Добавьте логику обработки ошибок. Отслеживайте бит .ER (Error) инструкции MSG. При ошибке увеличивайте счетчик ошибок и активируйте тег MODBUS_FAULT. Зафиксируйте ошибку до сброса оператором.
- Настройте сторожевой таймер. Если ответ Modbus не получен в течение 3 циклов сканирования, объявите частотник офлайн и вызовите сигнал тревоги процесса приоритета 3.
В: Как проверить связь Modbus TCP после ввода в эксплуатацию?
- Используйте встроенную веб-страницу диагностики модуля EN2T по адресу
http://192.168.1.10/diagnostic_modbus.htm. Проверьте статус соединения и уровень ошибок пакетов (PER). PER выше 0,1% указывает на проблемы в сети. - Мониторьте теги ControlLogix в онлайн-режиме RSLogix 5000. Убедитесь, что ATV630_STATUS отражает фактическое состояние частотника (работает/остановлен/авария).
- Проверьте путь записи, вручную введя значение ссылки частоты и подтвердив фактическую выходную частоту ATV630 на встроенном HMI.
- Смоделируйте сетевую ошибку, отключив Ethernet-кабель частотника. Убедитесь, что ПЛК генерирует сигнал ошибки связи в течение 3 циклов RPI.
Важно: Никогда не тестируйте команды записи Modbus на работающем процессе без подтверждения изоляции частотника от приводного оборудования. Внезапное изменение команды скорости может привести к механическим повреждениям.
В: Как устранить распространённые ошибки Modbus TCP?
- Ошибка 16#0001 — Отказано в соединении: Проверьте, что встроенный Ethernet-порт ATV630 включен для Modbus TCP (параметр nMBP = профиль Modbus TCP в меню параметров частотника).
- Ошибка 16#0016 — Неверный адрес регистра: Проверьте вычисление смещения Modbus. Вычтите 1 из номера регистра Modbus (Modbus использует адресацию с 1, ControlLogix — с 0).
- Нет ответа, нет ошибки: Убедитесь, что Unit ID в сообщении Modbus совпадает с настроенным Unit ID Modbus TCP ATV630 (по умолчанию 255).
- Периодические тайм-ауты: Проверьте длину Ethernet-кабеля. Modbus TCP по медному кабелю поддерживает до 100 м на сегмент без повторителей.
Какой ключевой совет по действиям?
Всегда загружайте карту регистров Modbus из документации производителя устройства — номера регистров различаются между сериями ATV630, ATV320 и Sepam. Используйте функцию Modbus 16 для записи, чтобы избежать частичных обновлений регистров. Никогда не пропускайте логику сторожевого таймера — молчаливый тайм-аут Modbus может оставить частотник работающим на последней заданной скорости без уведомления ПЛК. Настройте путь обработки ошибок связи до подключения частотника к процессу. Документируйте полную карту регистров в поле описания тегов проекта ПЛК для последующего обслуживания. Для заводов с более чем 10 устройствами Modbus TCP рассмотрите возможность использования выделенного шлюза Modbus TCP-to-EtherNet/IP для разгрузки процессора EN2T и повышения детерминированности сети.
Автор: Лин Ван — инженер по промышленной автоматизации с более чем 11-летним опытом работы с Allen-Bradley ControlLogix, Modbus TCP и приводами Schneider Electric на производственных и нефтегазовых объектах Китая.















