کنترل محدوده تقسیم مکمل (CSRC): مهندسی مدیریت دقیق متغیرهای فرآیندی با عملگرهای دوگانه
کنترل محدوده تقسیم مکمل چیست و چرا از آن استفاده میشود؟
کنترل محدوده تقسیم مکمل یک استراتژی کنترلی است که از دو محرک استفاده میکند که در جهتهای مخالف کار میکنند تا یک متغیر فرایندی واحد را با دقت بالا تنظیم کنند. کنترل استاندارد با یک شیر نمیتواند دقت بالایی را هنگام ترکیب جریانهای مختلف رسانهای با نسبتهای دقیق فراهم کند. CSRC این مشکل را با اختصاص دادن نقش مکمل به هر محرک حل میکند: وقتی یک شیر باز میشود، شیر دیگر به همان نسبت بسته میشود.
این روش در مبدلهای حرارتی، سیستمهای ترکیب، کنترل دمای راکتور و واحدهای تنظیم گاز دیده میشود. پردازنده کنترل میدانی Foxboro FCP270 و PLCهای Allen-Bradley ControlLogix هر دو بلوکهای عملکردی بومی دارند که منطق خروجی محدوده تقسیم را مستقیماً در کنترلر پیادهسازی میکنند.
ابتدا باید بررسی کنیم چرا یک شیر واحد در این کاربردها ناکارآمد است. شیری که برای حداکثر جریان طراحی شده است، در حالت عادی در درصدهای بازشدگی بسیار پایین کار میکند. در بازشدگی ۵٪ تا ۱۰٪، منحنیهای مشخصه جریان غیرخطی میشوند و هیسترزیس موقعیتدهنده باعث نوسان محدود میشود. کیفیت کنترل در این ناحیه بازشدگی پایین به طور قابل توجهی کاهش مییابد.
نحوه کار CSRC: رابطه معکوس بین دو محرک
در سیستم CSRC، کنترلر PID یک سیگنال خروجی واحد تولید میکند — ۴ تا ۲۰ میلیآمپر یا ۰ تا ۱۰۰٪ در سیستمهای دیجیتال. این سیگنال به هر دو شیر کنترل به طور همزمان ارسال میشود. با این حال، هر شیر به بخش متفاوتی از محدوده خروجی پاسخ میدهد و پاسخهای آنها معکوس است.
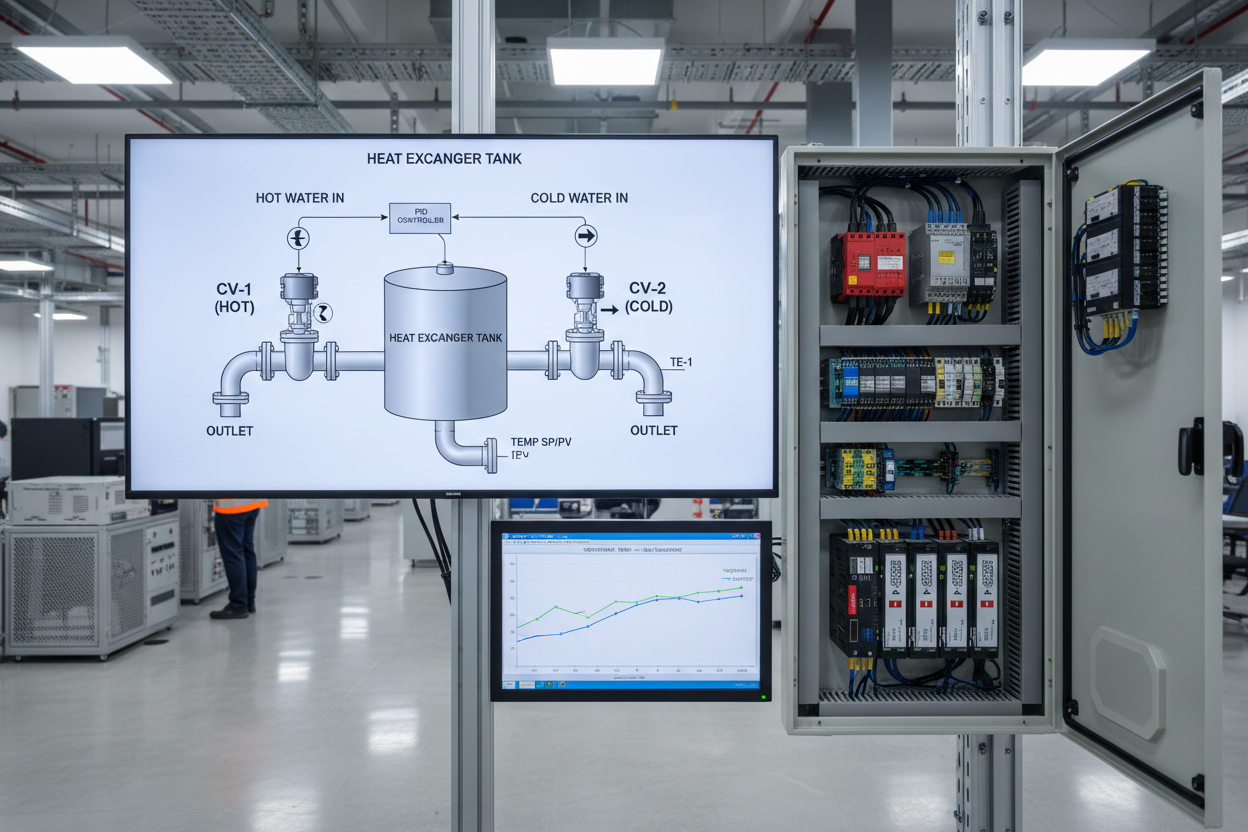
سیستم کنترل دمای مخزن با استفاده از جریانهای آب گرم و سرد را در نظر بگیرید. ماژول خروجی آنالوگ ۸ کاناله Allen-Bradley 1756-OF8 سیگنالهای مکمل را به هر دو موقعیتدهنده شیر ارسال میکند:
- گام ۱: شیر آب سرد از کاملاً باز در ۰٪ خروجی کنترلر تا کاملاً بسته در ۱۰۰٪ خروجی حرکت میکند. وقتی دمای فرایند بیش از حد بالا است، حداکثر آب سرد عبور میکند.
- گام ۲: شیر آب گرم سیگنال معکوس دریافت میکند — کاملاً بسته در ۰٪ خروجی و کاملاً باز در ۱۰۰٪ خروجی. وقتی دما خیلی پایین است، حداکثر آب گرم عبور میکند.
- گام ۳: در ۵۰٪ خروجی کنترلر، هر دو شیر در ۵۰٪ بازشدگی قرار دارند. نسبتهای مساوی آب گرم و سرد وارد مخزن میشوند و نقطه تنظیم با تنظیم مداوم در اطراف این نقطه حفظ میشود.
- گام ۴: با تغییر خروجی کنترلر، هر دو شیر به طور همزمان و معکوس تنظیم میشوند. نرخ جریان کل نسبتاً پایدار میماند در حالی که نسبت آب گرم به سرد تغییر میکند. این کنترل دقیق دما را بدون اختلالات جریان که سیستمهای تکشیر ایجاد میکنند، حفظ میکند.
پیکربندی PID در Allen-Bradley ControlLogix و Foxboro I/A
پیادهسازی CSRC در Allen-Bradley ControlLogix با استفاده از بلوکهای عملکرد ریاضی برای تولید دو سیگنال خروجی مکمل از مقدار CV کنترلر PID انجام میشود. فرمان شیر آب گرم برابر با CV به طور مستقیم است: HV_CMD = CV٪. فرمان شیر آب سرد مکمل آن است: CV_CMD = ۱۰۰٪ – CV٪. هر دو سیگنال از طریق ماژول خروجی آنالوگ ایزوله ۸ نقطهای Allen-Bradley 1756-OF8I به موقعیتدهندههای شیر مستقل ارسال میشوند.
علاوه بر این، یک ناحیه مرده در نقطه میانی — معمولاً در بازه ۴۵٪ تا ۵۵٪ خروجی — از نوسان همزمان هر دو شیر در نقطه تنظیم جلوگیری میکند. در این ناحیه مرده، تغییرات کوچک خروجی کنترلر بدون حرکت دادن هیچ یک از شیرها جذب میشود. این موضوع باعث کاهش قابل توجه سایش محرکها در طول عملیات پایدار میشود.
سری Foxboro I/A کنترل CSRC را از طریق بلوک عملکرد بومی SPLT (محدوده تقسیم) در معماری ماژول ارتباطات فیلدباس Foxboro I/A Series FCM10E پیادهسازی میکند. این بلوک یک ورودی واحد میپذیرد و دو خروجی مکمل با نقاط تقسیم قابل تنظیم، نواحی مرده و منحنیهای مشخصه شیر تولید میکند. بلوک SPLT Foxboro همچنین از تقسیم غیرمتقارن پشتیبانی میکند — برای مثال، اختصاص ۰٪ تا ۴۰٪ خروجی به شیر سرد و ۶۰٪ تا ۱۰۰٪ به شیر گرم، با ناحیه مرده از ۴۰٪ تا ۶۰٪.
پیکربندی غیرمتقارن زمانی مفید است که دو جریان رسانهای ظرفیتهای جریان متفاوتی داشته باشند. تنظیم نقاط تقسیم برای تطبیق با بهره فرایند در هر طرف، پایداری حلقه را بهبود میبخشد و از نوسان پس از تغییرات نقطه تنظیم میکاهد.
اندازهگیری، انتخاب شیر و پیکربندی ایمنی
اندازهگیری شیر برای CSRC با کاربردهای تکشیر متفاوت است. هر شیر در ۱۰۰٪ بازشدگی جریان طراحی کامل را عبور میدهد، اما وظیفه عملیاتی معمول در بازه ۳۰٪ تا ۷۰٪ بازشدگی متمرکز است. شیرهای بزرگتر از حد باعث مشکلات کنترلی در بازشدگیهای پایین میشوند. شیرهای کوچکتر از حد قبل از رسیدن کنترلر به ۱۰۰٪ خروجی به حد جریان خود میرسند. شیرهای با مشخصه درصد مساوی انتخاب استاندارد هستند — این مشخصه کنترل یکنواختی را در ناحیه عملیاتی میانی فراهم میکند.
علاوه بر این، هر دو شیر در جفت CSRC باید از موقعیتدهندههای همسان با دقت و مشخصات هیسترزیس برابر استفاده کنند. موقعیتدهندههای نامتناسب کنترل نامتقارن ایجاد میکنند — حلقه در یک جهت عملکرد خوبی دارد اما در جهت دیگر نوسان میکند. در کنترل دمای راکتور، ایمنی ترجیحی این است که در صورت از دست دادن هوای ابزار یا برق، شیر خنککننده کاملاً باز و شیر گرمایشی کاملاً بسته شود. این کار فرایند را به سمت شرایط سرد و ایمن هدایت میکند.
راهاندازی و تنظیم حلقه CSRC
- گام ۱: هر شیر را کاملاً باز و بسته کنید. اطمینان حاصل کنید که موقعیت فعلی با موقعیت فرمان داده شده در ±۲٪ برای شیرهای گلوب یا ±۱٪ برای شیرهای باترفلای با عملکرد بالا مطابقت دارد.
- گام ۲: تابع مکمل را در حالت دستی در خروجیهای ۲۵٪، ۵۰٪ و ۷۵٪ اعمال کنید. اطمینان حاصل کنید که شیر A به این مقادیر باز میشود و شیر B به ترتیب به ۷۵٪، ۵۰٪ و ۲۵٪ باز میشود.
- گام ۳: کنترل خودکار را با تنظیم اولیه محافظهکارانه فعال کنید — بهره تناسبی ۰.۵ و زمان انتگرال ۶۰ ثانیه. پاسخ حلقه به یک تغییر کوچک نقطه تنظیم ۲٪ تا ۵٪ از بازه را مشاهده کنید.
- گام ۴: بهره تناسبی را به تدریج افزایش دهید تا حلقه پاسخ با کاهش یک چهارم را داشته باشد. زمان انتگرال را کاهش دهید تا آفست در سه تا پنج چرخه حلقه از بین برود.
- گام ۵: پاسخ به تغییر بزرگ نقطه تنظیم ۲۰٪ از بازه را آزمایش کنید. اطمینان حاصل کنید که انتقال محدوده تقسیم در نقطه میانی باعث ضربه یا نوسان نمیشود — این انتقال رایجترین منبع ناپایداری حلقه CSRC است.
بنابراین، به رفتار خروجی PID هنگام عبور از نقطه تقسیم ۵۰٪ توجه ویژه داشته باشید. هرگونه ناپیوستگی در این نقطه نشاندهنده عدم تطابق بین پیکربندی محدوده تقسیم و منحنیهای پاسخ واقعی شیر است که قبل از تایید حلقه برای سرویس خودکار نیاز به تنظیم دارد.
نتیجهگیری و توصیه عملی
کنترل محدوده تقسیم مکمل یک تکنیک قدرتمند برای دستیابی به کنترل دقیق و پایدار دما و ترکیب است که در آن یک شیر واحد نمیتواند عملکرد مورد نیاز را فراهم کند. رابطه معکوس محرکها هر دو شیر را در نواحی عملیاتی دقیق میانی نگه میدارد و جریان کل پایدار را حفظ میکند. سری Foxboro I/A و Allen-Bradley ControlLogix پیادهسازیهای بومی اثبات شدهای ارائه میدهند که پیکربندی و راهاندازی را ساده میکنند. مهندسانی که CSRC را پیادهسازی میکنند باید بر اندازهگیری شیرهای همسان، مشخصات موقعیتدهندههای یکسان، پیکربندی نقطه تقسیم متقارن و تنظیم دقیق در گذر از نقطه میانی تمرکز کنند تا عملکرد قابل اعتماد حلقه کنترل را تضمین کنند.
نویسنده: وانگ جیاچیانگ، مهندس اتوماسیون صنعتی با بیش از ۱۰ سال تجربه در PLC، DCS و سیستمهای کنترل.















