Podešavanje Allen-Bradley ControlLogix Modbus TCP: Vodič za konfiguraciju RSLogix 5000
П: Зашто ми је потребан Modbus TCP на Allen-Bradley ControlLogix систему?
Allen-Bradley ControlLogix PLC-ови нативно користе EtherNet/IP. Међутим, многи пољски уређаји — посебно Schneider Electric Altivar (ATV) варијабилни фреквентни регулатори, Sepam заштитни релеји и PowerLogic бројила електричне енергије — подржавају само Modbus TCP. Ова неусклађеност захтева протоколски гатеwај или уграђеног Modbus TCP клијента унутар ControlLogix платформе.
Препоручени приступ користи Allen-Bradley 1756-EN2T EtherNet/IP Communication Bridge Module који покреће Modbus TCP клијент слој. За апликације са редундантном мрежом, Rockwell 1756-EN2TR Dual EtherNet/IP Module пружа подршку за Device Level Ring (DLR) уз могућност Modbus TCP клијента. Алтернативно, Allen-Bradley 1756-EN3TR ControlLogix Ethernet/IP Module подржава напредне безбедносне функције за Modbus TCP примене у OT мрежно сегментираним окружењима.
П: Коју хардверску и мрежну конфигурацију ми је потребно имати пре почетка?
- 1756-EN2T или 1756-EN3TR EtherNet/IP модул у слоту 1 ControlLogix шасије.
- Schneider ATV630 VFD повезан на исту Ethernet мрежу постројења са IP адресом 192.168.1.20.
- CAT6 заштићени кабл од EN2T порта до управљачког свича. Избегавајте даisy-chain повезивање VFD-ова директно на контролер модул.
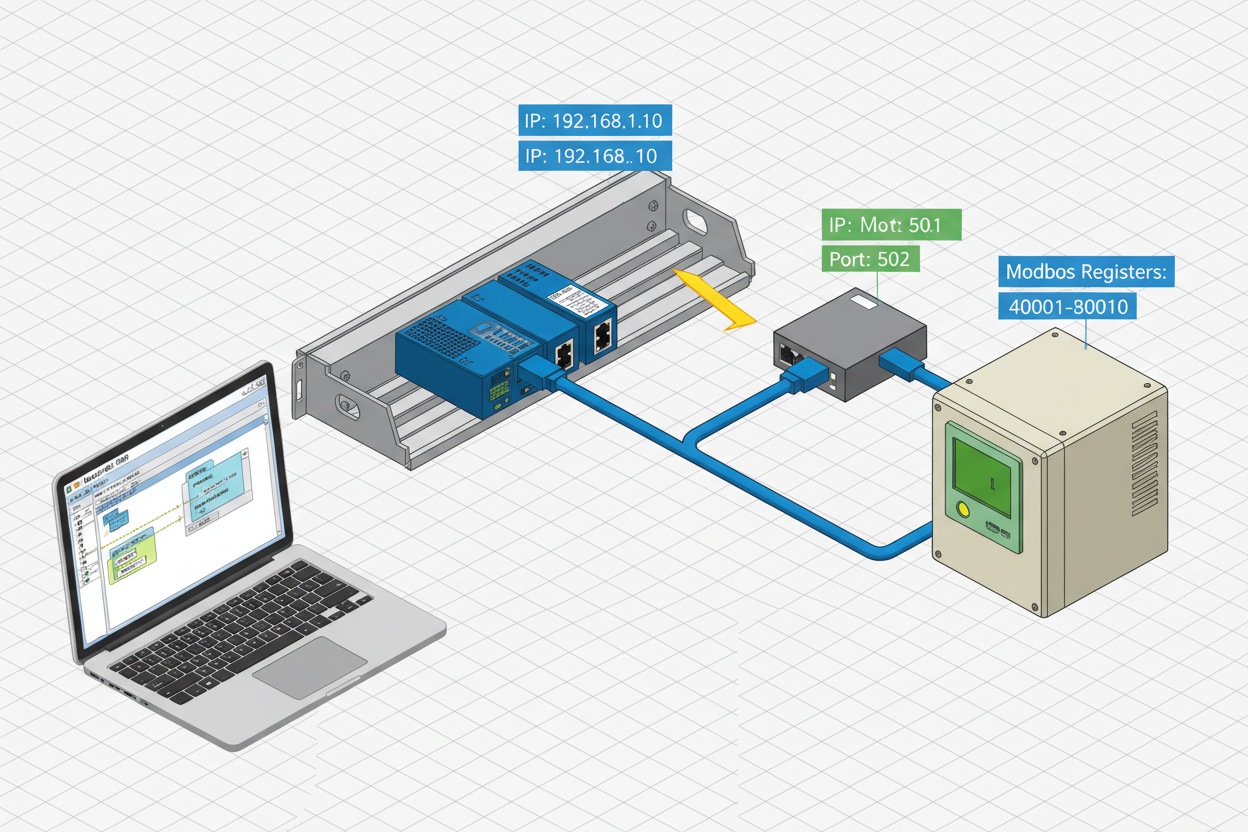
- Мрежни подсет мора бити конзистентан: PLC на 192.168.1.10, VFD на 192.168.1.20, гатеwај на 192.168.1.30.
- Modbus TCP користи порт 502. Обезбедите да је порт 502 отворен на заштитном зиду постројења за релевантни VLAN.
П: Како да конфигуришем 1756-EN2T модул у RSLogix 5000?
- У пројектном стаблу, кликните десним тастером на I/O Configuration → 1756-Backplane → 1756-L85E. Изаберите New Module. Претражите „1756-EN2T.”
- Поставите IP адресу модула на 192.168.1.10. Конфигуришите број слота (обично слот 1) и величину шасије.
- У својствима модула омогућите Use Unicast Connection за Modbus TCP циљеве. Ово смањује мрежни broadcast саобраћај на великим Modbus подсетима.
- Поставите Requested Packet Interval (RPI) на 100 ms за процесно критичне регистре. За некритично праћење прихватљиво је 500 ms.
П: Како да мапирам Schneider ATV630 Modbus регистре на ControlLogix тагове?
Додајте нови Modbus TCP Master (Client) уређај из Add-on Profile (AOP) за EN2T модул. Конфигуришите циљни уређај: IP адреса 192.168.1.20, Порт 502, Unit ID 255 (стандард за Modbus TCP). ATV630 користи следеће кључне опсеге регистара:
- Регистар 32001 (CMd): команда старт/стоп — упишите 1 = Погон унапред, 6 = Стоп.
- Регистар 32002 (FrS): референтна фреквенција — упишите 0–1000 што представља 0–100% максималне фреквенције.
- Регистар 32101 (nSt): статусни реч погона — читајте да бисте потврдили стање Погон/Стоп/Грешка.
- Регистар 32102 (rFr): повратна фреквенција излаза — читајте у Hz.
Мапирајте Modbus регистре на ControlLogix тагове: ATV630_CMD_WORD (INT), ATV630_FREQ_REF (INT), ATV630_STATUS (INT), ATV630_FREQ_FB (REAL).
П: Како да напишем Modbus TCP логику читања/писања у RSLogix 5000?
- Креирајте периодичну задаћу (100 ms) која покреће Modbus захтев. Користите MSG инструкцију конфигурисану као Modbus Read.
- Читање поруке: Сервис = Read Holding Registers (Функција 03), Изворни елемент = ATV630_FREQ_FB, Број елемената = 1, Адреса уређаја = 192.168.1.20, Modbus офсет = 32101 (одузмите 1 од броја регистра — Modbus користи адресирање почевши од 1).
- Писање поруке: Сервис = Write Multiple Registers (Функција 16), Изворни елемент = ATV630_FREQ_REF, Број регистара = 1, Modbus офсет = 32001.
- Додајте логику за обраду грешака. Пратите .ER (Error) бит MSG инструкције. При грешци повећајте бројач грешака и активирајте MODBUS_FAULT таг. Закључајте грешку док је оператор не ресетује.
- Конфигуришите watchdog тајмер. Ако Modbus одговор није примљен у року од 3 скен циклуса, прогласите VFD офлајн и покрените аларм процеса приоритета 3.
П: Како да проверим Modbus TCP комуникацију након пуштања у рад?
- Користите уграђену веб дијагностичку страницу EN2T модула на
http://192.168.1.10/diagnostic_modbus.htm. Проверите статус везе и стопу грешака пакета (PER). PER изнад 0.1% указује на мрежне проблеме. - Пратите ControlLogix тагове у RSLogix 5000 онлајн режиму. Потврдите да ATV630_STATUS одражава стварно стање VFD-а (покреће се/заустављен/у грешци).
- Тестирајте пут писања ручним уносом вредности референтне фреквенције и проверите стварну излазну фреквенцију ATV630 на уграђеном HMI-ју.
- Симулирајте мрежни квар искључивањем Ethernet кабла VFD-а. Потврдите да PLC генерише аларм комуникационе грешке у року од 3 RPI циклуса.
Важно: Никада не тестирајте Modbus write команде на живом процесу без потврде да је VFD изолован од покретане опреме. Изненадна промена брзине може изазвати механичка оштећења.
П: Како да решавам уобичајене Modbus TCP грешке?
- Грешка 16#0001 — Веза одбијена: Проверите да ли је уграђени Ethernet порт ATV630 омогућен за Modbus TCP (параметар nMBP = Modbus TCP профил у менију параметара VFD-а).
- Грешка 16#0016 — Неважећа адреса регистра: Потврдите израчунавање Modbus офсета. Одузмите 1 од броја Modbus регистра (Modbus користи адресирање почевши од 1; ControlLogix користи почевши од 0).
- Нема одговора, нема грешке: Потврдите да Unit ID у Modbus поруци одговара конфигурисаном Modbus TCP Unit ID ATV630-а (подразумевано = 255).
- Прекидни тајмаути: Проверите дужину Ethernet кабла. Modbus TCP преко бакра подржава до 100 м по сегменту без репитера.
Који је кључни савет за акцију?
Увек преузмите Modbus мапу регистара из документације произвођача уређаја — бројеви регистара варирају између ATV630, ATV320 и Sepam серија. За писање користите Modbus функцију 16 да бисте избегли делимична ажурирања регистра. Никада не прескакајте логику watchdog тајмера — тихи Modbus тајмаут може оставити VFD да ради на последњој наређеној брзини без знања PLC-а. Пуштање у рад пута комуникационе грешке обавите пре повезивања VFD-а на процес. Документујте комплетну мапу регистара у описном пољу тагова PLC пројекта за будуће одржавање. За постројења са више од 10 Modbus TCP уређаја, размислите о коришћењу посебног Modbus TCP-to-EtherNet/IP гатеwај модула ради смањења оптерећења EN2T процесора и побољшања укупне детерминисаности мреже.
Аутор: Lin Wang је инжењер индустријске аутоматизације са преко 11 година искуства у Allen-Bradley ControlLogix, Modbus TCP и Schneider Electric погонским уређајима у производним и нафтно-гасним постројењима у Кини.















