Konfiguracja Allen-Bradley ControlLogix Modbus TCP: Przewodnik po konfiguracji RSLogix 5000
P: Dlaczego potrzebuję Modbus TCP w systemie Allen-Bradley ControlLogix?
Sterowniki Allen-Bradley ControlLogix natywnie komunikują się za pomocą EtherNet/IP. Jednak wiele urządzeń polowych — zwłaszcza przemienniki częstotliwości Schneider Electric Altivar (ATV), przekaźniki ochronne Sepam oraz liczniki energii PowerLogic — obsługuje wyłącznie Modbus TCP. Ta niezgodność wymaga zastosowania bramki protokołu lub wbudowanego klienta Modbus TCP w platformie ControlLogix.
Zalecanym rozwiązaniem jest użycie modułu komunikacyjnego Allen-Bradley 1756-EN2T EtherNet/IP Communication Bridge Module z warstwą klienta Modbus TCP. Dla aplikacji z redundantną siecią, moduł Rockwell 1756-EN2TR Dual EtherNet/IP oferuje wsparcie Device Level Ring (DLR) wraz z funkcjonalnością klienta Modbus TCP. Alternatywnie, moduł Allen-Bradley 1756-EN3TR ControlLogix Ethernet/IP Module zapewnia zaawansowane funkcje bezpieczeństwa dla wdrożeń Modbus TCP w segmentowanych sieciach OT.
P: Jakie sprzęt i konfigurację sieci muszę przygotować przed rozpoczęciem?
- Moduł EtherNet/IP 1756-EN2T lub 1756-EN3TR w slocie 1 obudowy ControlLogix.
- Przemiennik częstotliwości Schneider ATV630 podłączony do tej samej sieci Ethernet zakładu z adresem IP 192.168.1.20.
- Kabel ekranowany CAT6 od portu EN2T do przełącznika zarządzalnego. Unikaj łańcuchowego łączenia przemienników bezpośrednio do modułu sterownika.
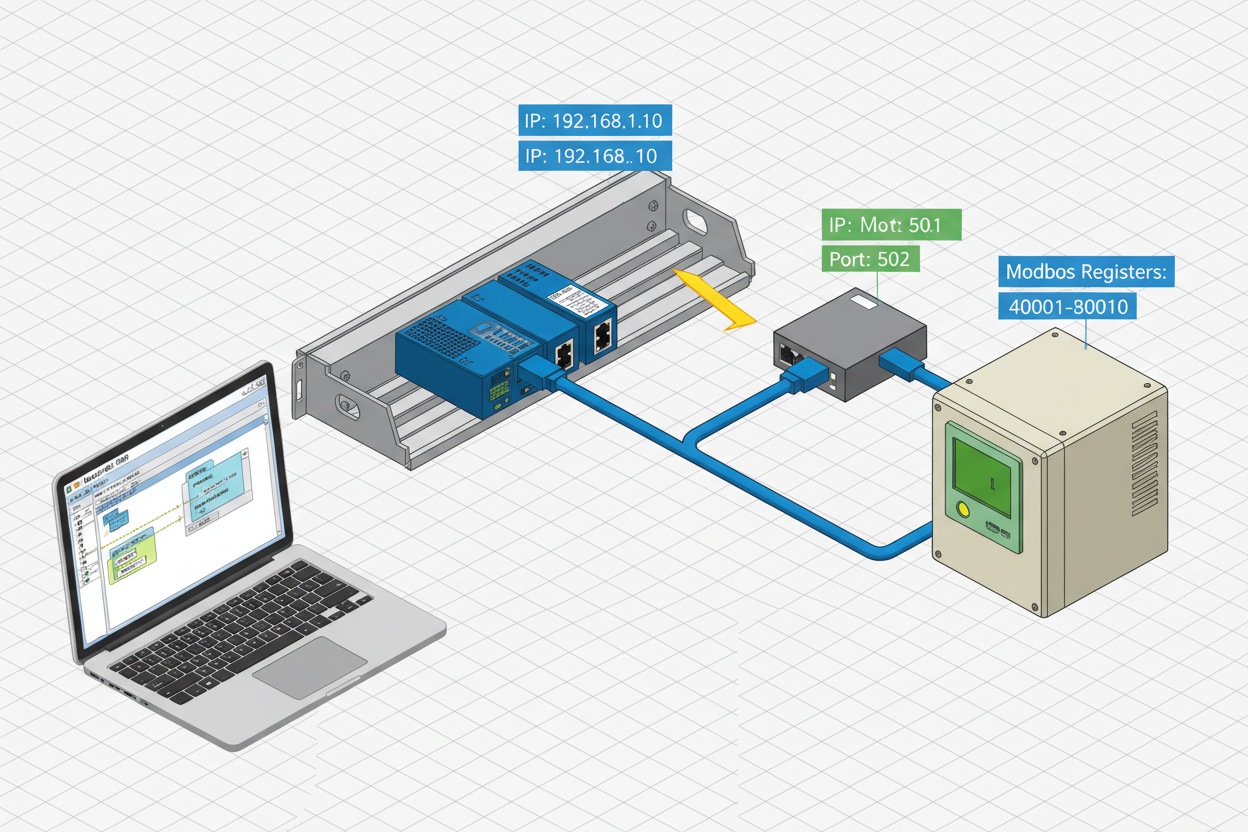
- Podsieć sieciowa musi być spójna: PLC pod adresem 192.168.1.10, VFD pod 192.168.1.20, brama sieciowa pod 192.168.1.30.
- Modbus TCP używa portu 502. Upewnij się, że port 502 jest otwarty na zaporze sieciowej dla odpowiedniego VLAN-u.
P: Jak skonfigurować moduł 1756-EN2T w RSLogix 5000?
- W drzewie projektu kliknij prawym przyciskiem myszy I/O Configuration → 1756-Backplane → 1756-L85E. Wybierz Nowy Moduł. Wyszukaj „1756-EN2T”.
- Ustaw adres IP modułu na 192.168.1.10. Skonfiguruj numer slotu (zazwyczaj slot 1) oraz rozmiar obudowy.
- W właściwościach modułu włącz opcję Use Unicast Connection dla celów Modbus TCP. Zmniejsza to ruch rozgłoszeniowy w dużych podsieciach Modbus.
- Ustaw Requested Packet Interval (RPI) na 100 ms dla rejestrów krytycznych procesowo. Dla monitoringu niekrytycznego akceptowalne jest 500 ms.
P: Jak odwzorować rejestry Modbus Schneider ATV630 na tagi ControlLogix?
Dodaj nowe urządzenie Modbus TCP Master (Client) z profilu dodatku (AOP) dla modułu EN2T. Skonfiguruj urządzenie docelowe: adres IP 192.168.1.20, port 502, Unit ID 255 (standard dla Modbus TCP). ATV630 używa następujących kluczowych zakresów rejestrów:
- Rejestr 32001 (CMd): Komenda start/stop — zapisz 1 = jazda do przodu, 6 = stop.
- Rejestr 32002 (FrS): Referencja częstotliwości — zapisz wartość 0–1000 odpowiadającą 0–100% maksymalnej częstotliwości.
- Rejestr 32101 (nSt): Słowo statusu napędu — odczyt do potwierdzenia stanu jazdy/zatrzymania/usterki.
- Rejestr 32102 (rFr): Sprzężenie zwrotne częstotliwości wyjściowej — odczyt w Hz.
Mapuj rejestry Modbus na tagi ControlLogix: ATV630_CMD_WORD (INT), ATV630_FREQ_REF (INT), ATV630_STATUS (INT), ATV630_FREQ_FB (REAL).
P: Jak napisać logikę odczytu/zapisu Modbus TCP w RSLogix 5000?
- Utwórz zadanie okresowe (100 ms) wyzwalające żądanie Modbus. Użyj instrukcji MSG skonfigurowanej jako Modbus Read.
- Odczyt wiadomości: Usługa = Read Holding Registers (Funkcja 03), Element źródłowy = ATV630_FREQ_FB, Liczba elementów = 1, Adres urządzenia = 192.168.1.20, Offset Modbus = 32101 (odejmij 1 od numeru rejestru — Modbus używa adresowania 1-based).
- Wiadomość zapisu: Usługa = Write Multiple Registers (Funkcja 16), Element źródłowy = ATV630_FREQ_REF, Liczba rejestrów = 1, Offset Modbus = 32001.
- Dodaj logikę obsługi błędów. Monitoruj bit .ER (Error) instrukcji MSG. W przypadku błędu zwiększ licznik błędów i ustaw tag MODBUS_FAULT. Zatrzymaj błąd do momentu potwierdzenia przez operatora przyciskiem resetu.
- Skonfiguruj timer watchdog. Jeśli odpowiedź Modbus nie nadejdzie w ciągu 3 cykli skanowania, zadeklaruj VFD jako offline i wyzwól alarm procesu o priorytecie 3.
P: Jak zweryfikować komunikację Modbus TCP po uruchomieniu?
- Użyj wbudowanej strony diagnostycznej modułu EN2T pod adresem
http://192.168.1.10/diagnostic_modbus.htm. Sprawdź status połączenia i wskaźnik błędów pakietów (PER). PER powyżej 0,1% wskazuje na problemy sieciowe. - Monitoruj tagi ControlLogix w trybie online RSLogix 5000. Potwierdź, że ATV630_STATUS odzwierciedla rzeczywisty stan VFD (pracuje/zatrzymany/usterka).
- Przetestuj ścieżkę zapisu, ręcznie wpisując wartość referencji częstotliwości i weryfikując rzeczywistą częstotliwość wyjściową ATV630 na wbudowanym HMI.
- Zasymuluj awarię sieci, odłączając kabel Ethernet VFD. Potwierdź, że PLC generuje alarm błędu komunikacji w ciągu 3 cykli RPI.
Ważne: Nigdy nie testuj poleceń zapisu Modbus na działającym procesie bez potwierdzenia, że VFD jest odizolowany od napędzanego urządzenia. Nagła zmiana prędkości może spowodować uszkodzenia mechaniczne.
P: Jak rozwiązywać typowe błędy Modbus TCP?
- Błąd 16#0001 — Połączenie odrzucone: Sprawdź, czy wbudowany port Ethernet ATV630 jest włączony dla Modbus TCP (parametr nMBP = profil Modbus TCP w menu parametrów VFD).
- Błąd 16#0016 — Nieprawidłowy adres rejestru: Zweryfikuj obliczenie offsetu Modbus. Odejmij 1 od numeru rejestru Modbus (Modbus używa adresowania 1-based; ControlLogix 0-based).
- Brak odpowiedzi, brak błędu: Potwierdź, że Unit ID w wiadomości Modbus odpowiada skonfigurowanemu Unit ID Modbus TCP ATV630 (domyślnie 255).
- Przerywane timeouty: Sprawdź długość kabla Ethernet. Modbus TCP po miedzi obsługuje do 100 m na segment bez repeaterów.
Jaka jest kluczowa rada?
Zawsze pobieraj mapę rejestrów Modbus z dokumentacji producenta urządzenia — numery rejestrów różnią się między ATV630, ATV320 i serią Sepam. Do zapisów używaj funkcji Modbus 16, aby uniknąć częściowych aktualizacji rejestrów. Nigdy nie pomijaj logiki timera watchdog — ciche timeouty Modbus mogą pozostawić VFD pracujący z ostatnią zadaną prędkością bez wiedzy PLC. Skonfiguruj ścieżkę błędu komunikacji przed podłączeniem VFD do procesu. Udokumentuj pełną mapę rejestrów w polu opisu tagów projektu PLC dla przyszłej konserwacji. W zakładach z więcej niż 10 urządzeniami Modbus TCP rozważ wdrożenie dedykowanej bramki Modbus TCP-to-EtherNet/IP, aby odciążyć procesor EN2T i poprawić deterministykę sieci.
Autor: Lin Wang jest inżynierem automatyki przemysłowej z ponad 11-letnim doświadczeniem w systemach Allen-Bradley ControlLogix, Modbus TCP oraz napędach Schneider Electric w zakładach produkcyjnych i naftowo-gazowych w Chinach.















