Configuration Modbus TCP Allen-Bradley ControlLogix : Guide de configuration RSLogix 5000
Q : Pourquoi ai-je besoin de Modbus TCP sur un système Allen-Bradley ControlLogix ?
Les automates programmables Allen-Bradley ControlLogix utilisent nativement EtherNet/IP. Cependant, de nombreux équipements de terrain — en particulier les variateurs de fréquence Schneider Electric Altivar (ATV), les relais de protection Sepam et les compteurs d’énergie PowerLogic — ne supportent que Modbus TCP. Ce décalage nécessite une passerelle de protocole ou un client Modbus TCP intégré dans la plateforme ControlLogix.
L’approche recommandée utilise le module de communication Allen-Bradley 1756-EN2T EtherNet/IP fonctionnant avec une couche client Modbus TCP. Pour les applications réseau redondantes, le module Rockwell 1756-EN2TR Dual EtherNet/IP offre un support Device Level Ring (DLR) en plus de la capacité client Modbus TCP. En alternative, le module Allen-Bradley 1756-EN3TR ControlLogix Ethernet/IP propose des fonctionnalités de sécurité renforcées pour les déploiements Modbus TCP dans des environnements OT segmentés en réseau.
Q : Quel matériel et configuration réseau dois-je préparer avant de commencer ?
- Module EtherNet/IP 1756-EN2T ou 1756-EN3TR en emplacement 1 du châssis ControlLogix.
- Variateur de fréquence Schneider ATV630 connecté au même réseau Ethernet de l’usine avec l’adresse IP 192.168.1.20.
- Câble blindé CAT6 du port EN2T vers le switch managé. Évitez de chaîner les variateurs directement au module contrôleur.
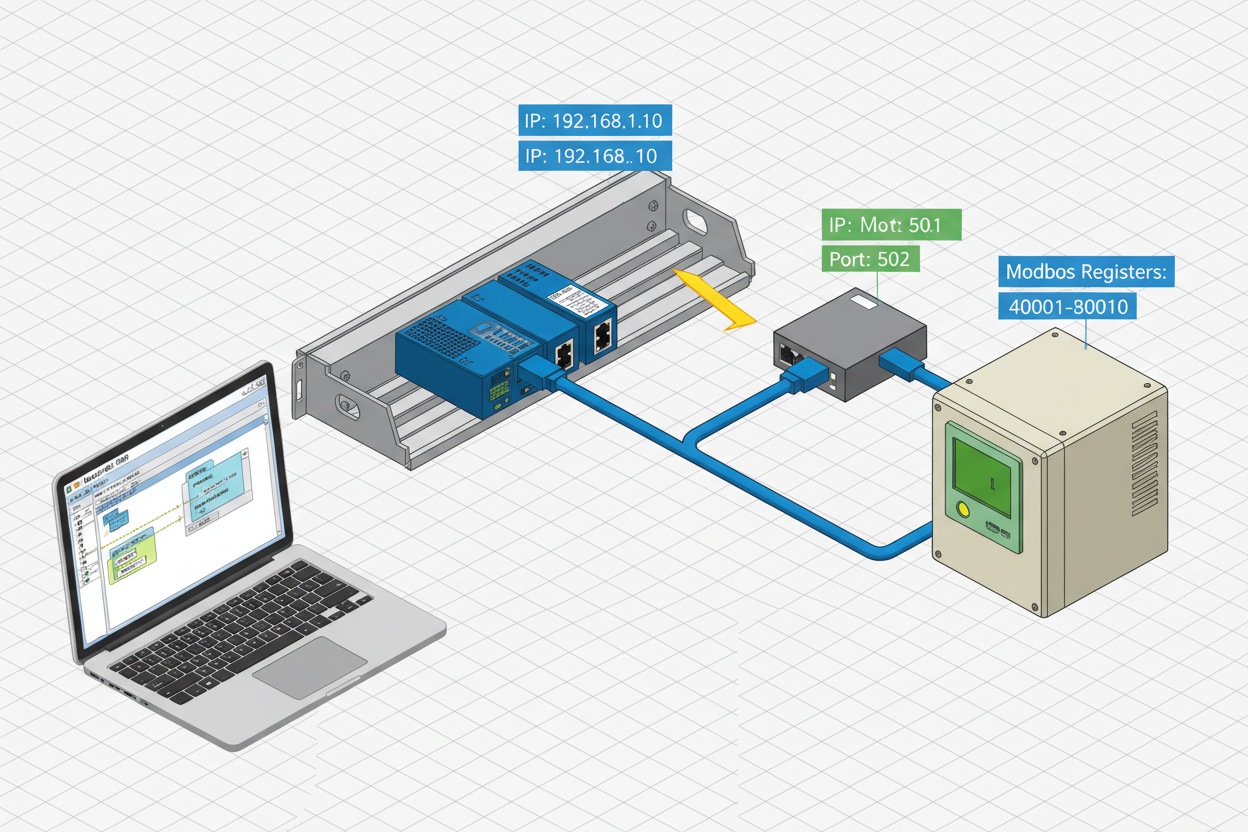
- Le sous-réseau doit être cohérent : PLC à 192.168.1.10, variateur à 192.168.1.20, passerelle à 192.168.1.30.
- Modbus TCP utilise le port 502. Assurez-vous que le port 502 est ouvert sur le pare-feu de l’usine pour le VLAN concerné.
Q : Comment configurer le module 1756-EN2T dans RSLogix 5000 ?
- Dans l’arborescence du projet, clic droit sur I/O Configuration → 1756-Backplane → 1756-L85E. Sélectionnez Nouveau module. Recherchez « 1756-EN2T ».
- Attribuez l’adresse IP du module à 192.168.1.10. Configurez le numéro d’emplacement (généralement emplacement 1) et la taille du châssis.
- Dans les propriétés du module, activez l’option Utiliser la connexion unicast pour les cibles Modbus TCP. Cela réduit le trafic broadcast sur les grands sous-réseaux Modbus.
- Réglez l’intervalle de paquet demandé (RPI) à 100 ms pour les registres critiques du processus. Pour la surveillance non critique, 500 ms est acceptable.
Q : Comment mapper les registres Modbus du Schneider ATV630 aux tags ControlLogix ?
Ajoutez un nouvel appareil Modbus TCP Maître (Client) depuis le profil additionnel (AOP) pour le module EN2T. Configurez l’appareil cible : adresse IP 192.168.1.20, port 502, ID d’unité 255 (standard Modbus TCP). L’ATV630 utilise les plages de registres clés suivantes :
- Registre 32001 (CMd) : Commande démarrer/arrêter — écrire 1 = Marche avant, 6 = Arrêt.
- Registre 32002 (FrS) : Référence de fréquence — écrire 0–1000 représentant 0–100 % de la fréquence maximale.
- Registre 32101 (nSt) : Mot d’état du variateur — lecture pour confirmer l’état Marche/Arrêt/Faute.
- Registre 32102 (rFr) : Retour de fréquence de sortie — lecture en Hz.
Mappez les registres Modbus aux tags ControlLogix : ATV630_CMD_WORD (INT), ATV630_FREQ_REF (INT), ATV630_STATUS (INT), ATV630_FREQ_FB (REAL).
Q : Comment écrire la logique de lecture/écriture Modbus TCP dans RSLogix 5000 ?
- Créez une tâche périodique (100 ms) pour déclencher la requête Modbus. Utilisez l’instruction MSG configurée en lecture Modbus.
- Message de lecture : Service = Lire les registres de maintien (Fonction 03), Élément source = ATV630_FREQ_FB, Nombre d’éléments = 1, Adresse de l’appareil = 192.168.1.20, Décalage Modbus = 32101 (soustrayez 1 du numéro de registre — Modbus utilise une adresse à base 1).
- Message d’écriture : Service = Écrire plusieurs registres (Fonction 16), Élément source = ATV630_FREQ_REF, Nombre de registres = 1, Décalage Modbus = 32001.
- Ajoutez une logique de gestion des erreurs. Surveillez le bit .ER (Erreur) de l’instruction MSG. En cas d’erreur, incrémentez un compteur d’erreurs et activez un tag MODBUS_FAULT. Verrouillez la faute jusqu’à ce qu’un bouton d’acquittement opérateur la réinitialise.
- Configurez un temporisateur watchdog. Si la réponse Modbus n’est pas reçue dans les 3 cycles de scan, déclarez le variateur hors ligne et déclenchez une alarme de processus de priorité 3.
Q : Comment vérifier la communication Modbus TCP après la mise en service ?
- Utilisez la page de diagnostic web intégrée du module EN2T à l’adresse
http://192.168.1.10/diagnostic_modbus.htm. Vérifiez le statut de la connexion et le taux d’erreur de paquets (PER). Un PER supérieur à 0,1 % indique des problèmes réseau. - Surveillez les tags ControlLogix en mode en ligne dans RSLogix 5000. Confirmez que ATV630_STATUS reflète l’état réel du variateur (en marche/arrêt/en défaut).
- Testez la voie d’écriture en saisissant manuellement une valeur de référence de fréquence et vérifiez la fréquence de sortie réelle de l’ATV630 sur son IHM intégrée.
- Simulez une panne réseau en débranchant le câble Ethernet du variateur. Confirmez que le PLC génère une alarme de défaut de communication dans les 3 cycles RPI.
Important : Ne testez jamais les commandes d’écriture Modbus sur un process en fonctionnement sans avoir isolé le variateur de l’équipement entraîné. Un changement brutal de consigne de vitesse peut causer des dommages mécaniques.
Q : Comment dépanner les erreurs courantes Modbus TCP ?
- Erreur 16#0001 — Connexion refusée : Vérifiez que le port Ethernet embarqué de l’ATV630 est activé pour Modbus TCP (paramètre nMBP = profil Modbus TCP dans le menu paramètres du variateur).
- Erreur 16#0016 — Adresse de registre invalide : Vérifiez le calcul du décalage Modbus. Soustrayez 1 du numéro de registre Modbus (Modbus utilise une adresse à base 1 ; ControlLogix à base 0).
- Pas de réponse, pas d’erreur : Confirmez que l’ID d’unité dans le message Modbus correspond à l’ID d’unité Modbus TCP configuré sur l’ATV630 (par défaut = 255).
- Timeouts intermittents : Vérifiez la longueur du câble Ethernet. Modbus TCP sur cuivre supporte jusqu’à 100 m par segment sans répéteurs.
Quel est le conseil clé à retenir ?
Téléchargez toujours la carte des registres Modbus depuis la documentation constructeur — les numéros de registres varient entre les séries ATV630, ATV320 et Sepam. Utilisez la fonction Modbus 16 pour les écritures afin d’éviter les mises à jour partielles de registres. Ne négligez jamais la logique du temporisateur watchdog — un timeout Modbus silencieux peut laisser un variateur tourner à sa dernière vitesse commandée sans que le PLC ne le sache. Mettez en service la voie de défaut de communication avant de connecter le variateur au process. Documentez la carte complète des registres dans le champ description des tags du projet PLC pour faciliter la maintenance future. Pour les usines avec plus de 10 appareils Modbus TCP, envisagez de déployer un module passerelle Modbus TCP vers EtherNet/IP dédié pour décharger la traduction de protocole du processeur EN2T et améliorer la détermination globale du réseau.
Auteur : Lin Wang est un ingénieur en automatisation industrielle avec plus de 11 ans d’expérience sur Allen-Bradley ControlLogix, Modbus TCP et variateurs Schneider Electric dans les secteurs de la fabrication et du pétrole & gaz en Chine.















